Spécialisé dans la vente de produits robotiques ! Robots éducatifs, robots jouets, objets connectés
- Accueil >
- Robots Educatifs >
- TurtleBot 3 > Turtlebot3 Burger with Raspberry Pi 4 - 2GB


Turtlebot3 Burger with Raspberry Pi 4 - 2GB

Découvrez le ROBOTIS TURTLEBOT3, la plateforme de développement de référence conçue par ROS.org pour les entreprises, les centres de recherche et les universités. Le Robot Operating System (ROS) est un environnement open source destiné au développement de systèmes autonomes. Sa large communauté d'utilisateurs permet d'étendre continuellement ses possibilités.
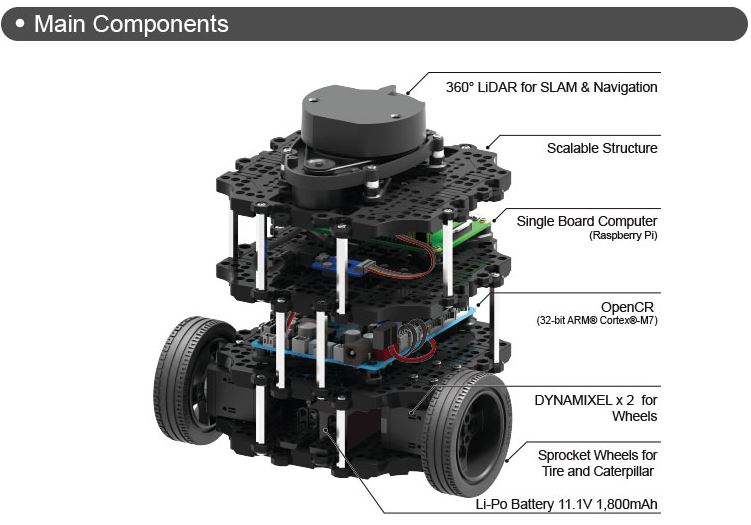
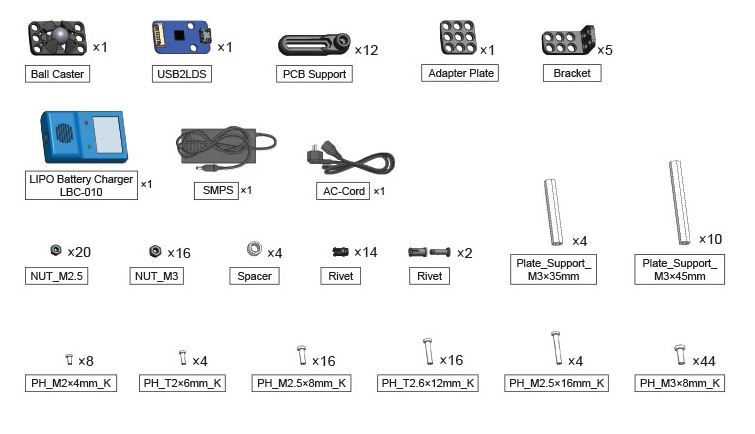
Le Turtlebot3 Burger intègre un Raspberry Pi 4, un système LiDAR ROBOTIS 360°, une unité de contrôle OpenCR et deux servomoteurs Dynamixel assurant la mobilité.
Turtlebot3 Burger with Raspberry Pi 4 - 2GB
Découvrez le ROBOTIS TURTLEBOT3, la plateforme de développement de référence conçue par ROS.org pour les entreprises, les centres de recherche et les universités. Le Robot Operating System (ROS) est un environnement open source destiné au développement de systèmes autonomes. Sa large communauté d'utilisateurs permet d'étendre continuellement ses possibilités. Le Turtlebot3 Burger intègre un Raspberry Pi 4, un système LiDAR ROBOTIS 360°, une unité de contrôle OpenCR et deux servomoteurs Dynamixel assurant la mobilité.
Ce qui distingue ce robot, c'est sa capacité à offrir une plateforme de développement abordable pour la cartographie et la localisation simultanées (SLAM) et la navigation. Grâce à des composants de haute qualité, il génère et traite des données de mesure fiables. En outre, la carte contrôleur OpenCR offre d'innombrables possibilités d'expansion, telles que la gestion d'un bras robotique ou l'intégration de technologies de capteurs supplémentaires. Les domaines d'application privilégiés du ROBOTIS TURTLEBOT3 Burger sont le SLAM et la navigation.