

Specialized in the sale of robotic products! educational robots, toy robots, connected objects
- Home >
- Educational Robots >
- ROBOTIS >
- Modules And Parts ROBOTIS > OpenManipulator-X Robotis RM-X52-TNM



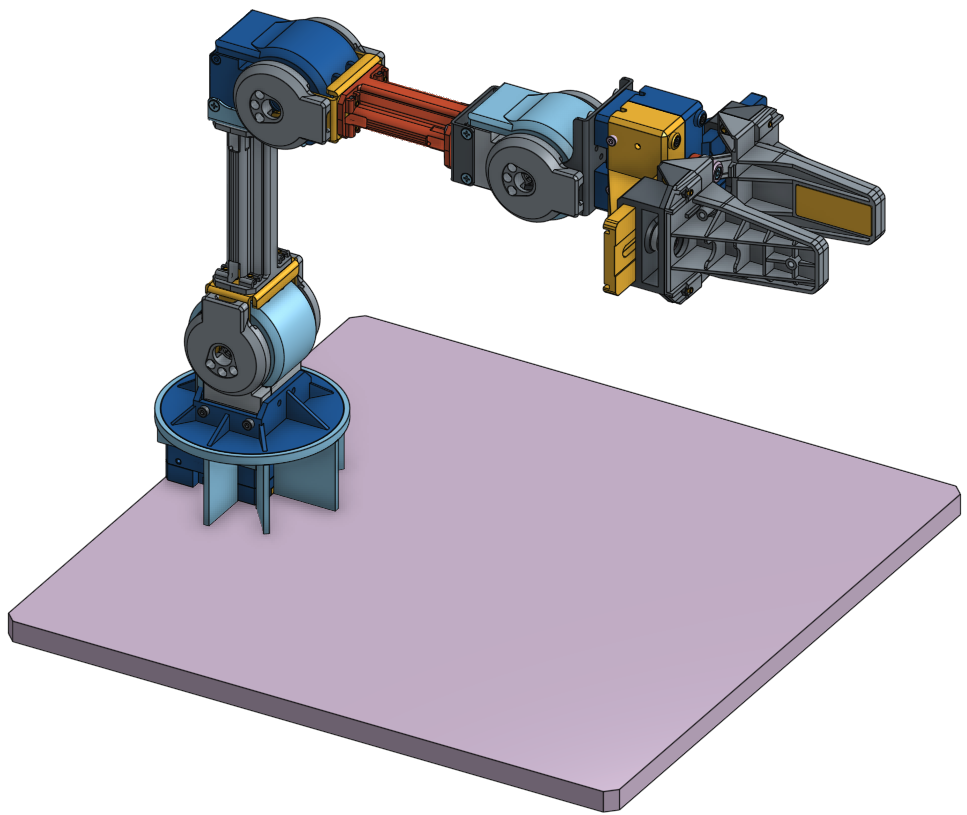
OpenManipulator-X Robotis RM-X52-TNM

ROS-enabled OpenMANIPULATOR-X (RM-X52-TNM) by Robotis is a full open robot platform consisting of OpenSoftware, OpenHardware and OpenCR(Embedded board).
OS-enabled OpenMANIPULATOR-X RM-X52-TNM by Robotis
OpenSoftware
OpenMANIPULATOR-X RM-X52-TNM are based on ROS and OpenSource. The TurtleBot series is the official ROS hardware platform that supports'TurtleBot Arm'. The OpenMANIPULATOR-X RM-X52-TNM is fully compatible with TurtleBot3. Users can also control it more easily by linking it with the MoveIt package! Even if you do not have a robot, you can control the robot in the Gazebo simulator.
OpenHardware
OpenMANIPULATOR-X RM-X52-TNM is an open, hardware-oriented platform. Most components are downloaded as STL files so that users can easily print them in 3d. It also allows users to modify the length of the links or the design of the robot for their own needs. OpenMANIPULATOR-X RM-X52-TNM is made of Dynamixel X Series which is used in TurtleBot.
OpenCR (Embedded Board)
OpenMANIPULATOR-X RM-X52-TNM can also be controlled using OpenCR (Open-source Control module for ROS), the control card used in TurtleBot3. OpenCR's computing power and real-time controllability can support front and rear kinematics, as well as profile control examples.
Dynamixels Examples
OpenMANIPULATOR-X RM-X52-TNM consists of the Dynamixel X series and 3D printing parts. Dynamixel has a modular shape and adopts the chain daisy method. It allows users to easily add or remove seals for their own use. Taking advantage of this feature, users can build seven different types of OpenMANIPULATOR-X series: Chain, SCARA, Link, Planar, Delta, Stewart and Linear.
Features of the Robotis OpenMANIPULATOR-X Robotic arm
- DYNAMIXEL XM430-W350-T
- Power Supply (sold separately) 12V
- Freedom of degree 5 (4DOF + 1DOF Gripper)
- Payload 500g
- RPM (joint) 46RPM
- Weight (assembly) 700g
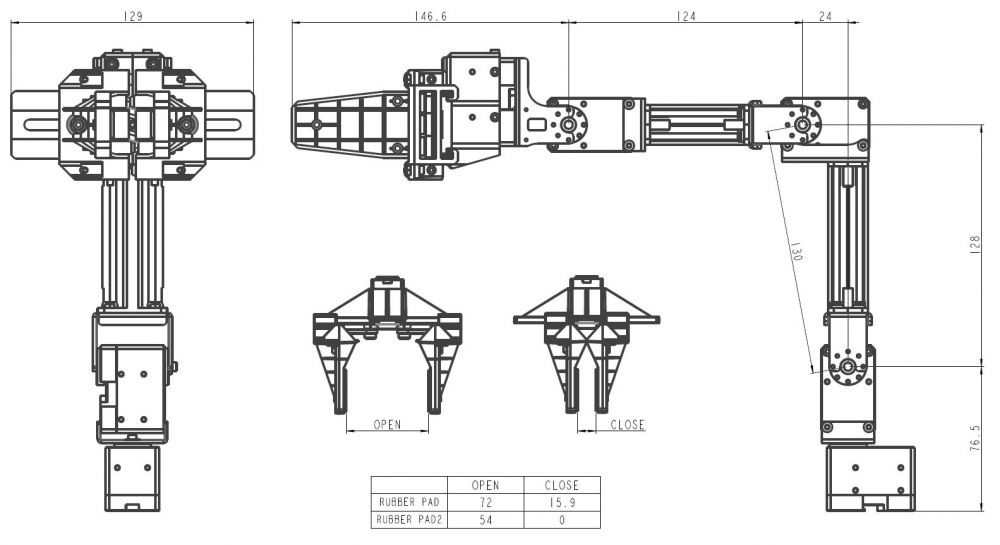
- Length 380mm
- Gripper stroke 20~75mm
- Interface TTL Level Multi Drop BUS
- Software ROS. DYNAMIXEL SDK, Arduino, Processing
- Controller (sold separately) PC, OpenCR
OpenMANIPULATOR-X RM-X52-TNM Robotis: in the box
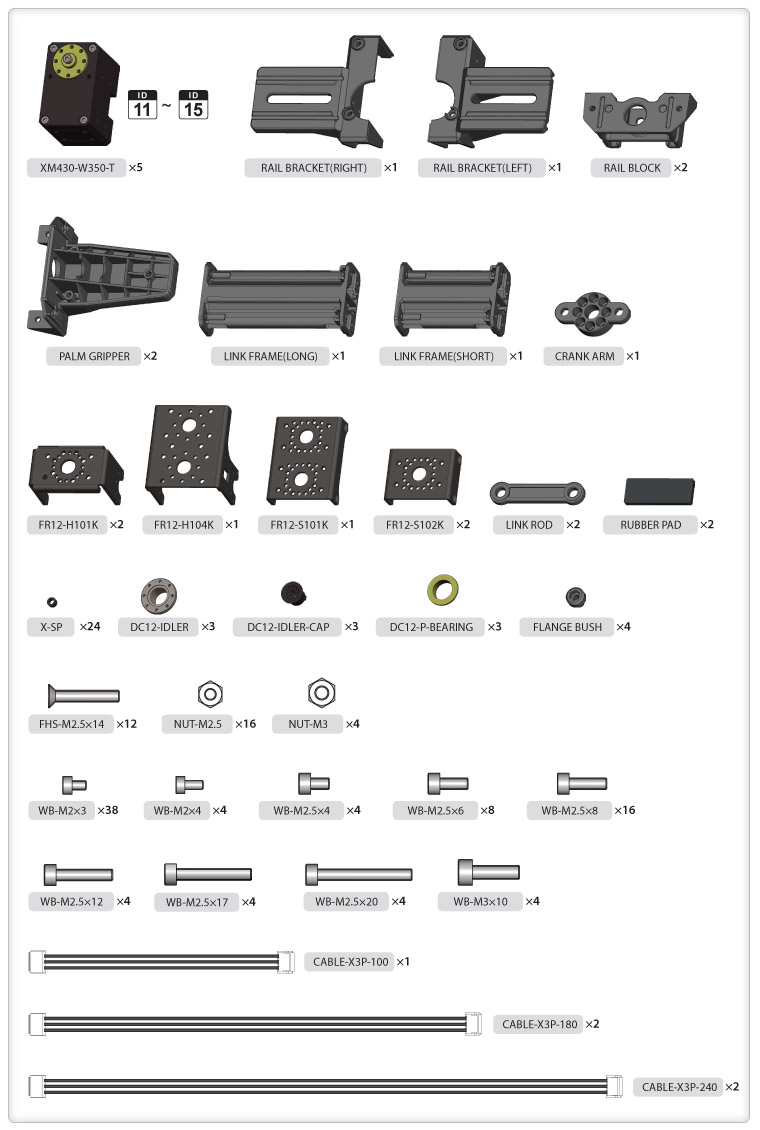
Caution
DYNAMIXEL, power supply, and controller are not included. Compatible with TB3 controller and power.
The assembly manual is not included, but you can download the PDF file on our sheet product above.







