

Spécialisé dans la vente de produits robotiques ! Robots éducatifs, robots jouets, objets connectés
- Accueil >
- Électro >
- Raspberry Pi > Carte Robotique Kitronik Pour Raspberry Pi Pico






Carte Robotique Kitronik Pour Raspberry Pi Pico

Avec la carte robotique compacte de Kitronik pour Raspberry Pi Pico, vous pouvez faire du Raspberry Pi Pico le cœur de votre nouveau projet robotique.
Le Raspberry Pi Pico (relié par un connecteur) peut faire fonctionner 4 moteurs (ou 2 moteurs pas à pas) et 8 servos avec cette carte robotique compacte. Elle dispose également de 27 ports d'extension E/S supplémentaires, ainsi que de connecteurs d'alimentation et de masse.
Carte robotique Kitronik pour Raspberry Pi Pico
Avec la carte robotique compacte de Kitronik pour Raspberry Pi Pico, vous pouvez faire du Raspberry Pi Pico le cœur de votre nouveau projet robotique. Le Raspberry Pi Pico (relié par un connecteur) peut faire fonctionner 4 moteurs (ou 2 moteurs pas à pas) et 8 servos avec cette carte robotique compacte. Elle dispose également de 27 ports d'extension E/S supplémentaires, ainsi que de connecteurs d'alimentation et de masse.
Deux circuits intégrés de commande de moteur à double pont en H sont inclus dans la carte robotique. Ils peuvent chacun piloter deux moteurs conventionnels ou un moteur pas à pas, avec une commande complète de marche avant, arrière et d'arrêt. Il existe en outre huit sorties servo, qui peuvent alimenter des servos à rotation régulière ou continue. Le Pico peut les contrôler toutes en utilisant l'interface I2C et un circuit intégré de pilotage à 16 canaux. La sortie IO se connecte à toutes les broches inutilisées du Pico. D'autres dispositifs, tels que des capteurs ou des DEL ZIP, peuvent être ajoutés à la carte en utilisant les 27 broches E/S disponibles.
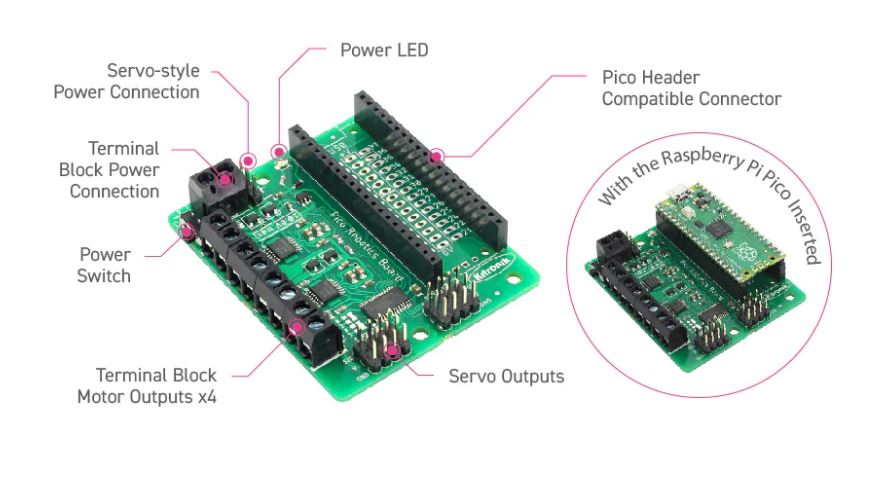
L'alimentation est fournie par un bornier ou une connexion de type servo. L'alimentation est ensuite contrôlée par un interrupteur marche/arrêt sur la carte, et une LED verte indique que la carte est sous tension. La carte génère alors une alimentation régulée de 3,3 V qui est fournie dans les connecteurs 3 V et GND pour alimenter le Pico. Il n'est donc pas nécessaire d'alimenter le Pico de manière indépendante. Les broches 3V et GND sont également séparées sur le connecteur, ce qui permet d'alimenter d'autres appareils.
Pour utiliser la carte robotique, insérez fermement le Pico dans le connecteur à deux rangées de broches de la carte. Assemblez le Pico en plaçant la connexion USB à la même extrémité que les connecteurs d'alimentation de la carte robotique. Cela vous permettra d'accéder à toutes les fonctionnalités de la carte ainsi qu'à chaque broche qui a été débranchée.
- Une petite carte riche en fonctionnalités destinée à alimenter vos projets robotiques Raspberry Pi Pico.
- La carte peut alimenter quatre moteurs (ou deux moteurs pas à pas) avec une commande complète de marche avant, arrière et d'arrêt, ainsi que huit servos.
- Elle dispose également de 27 ports d'extension E/S supplémentaires, ainsi que de connecteurs d'alimentation et de masse.
- Les canaux de communication I2C sont également séparés, ce qui permet de contrôler d'autres dispositifs compatibles I2C.
- La carte dispose également d'un interrupteur marche/arrêt et d'une LED d'état d'alimentation.
- La carte est alimentée par un bornier ou une connexion de type servo.
- Les dispositifs externes peuvent être alimentés en séparant les broches 3V et GND des pastilles à souder.
- Codez-le en MicroPython en utilisant un éditeur comme l'éditeur Thonny.
- Carte Raspberry Pi Pico Non incluse.
Carte robotique pour Raspberry Pi Pico : contenu, prérequis et ressources
Contenu :
- 1 x Kitronik Compact Robotics Board pour Raspberry Pi Pico.
Prérequis :
- Une carte Raspberry Pi Pico.
Ressources :
- Example MicroPython class and sample code - GitHub repository.
- Example CircuitPython class and sample code - GitHub repository.
- Get started with MicroPython on Raspberry Pi Pico.
- Tech Talks - live stream playback.
- Raspberry Pi Pico frequently asked questions.
- More information on the Pico.
- About MicroPython.
- About Python.
- The Thonny editor.
- Raspberry Pi Pico Datasheet.
- RP2040 Datasheet.
Contenu :
- 1 x Kitronik Compact Robotics Board pour Raspberry Pi Pico.
Prérequis :
- Une carte Raspberry Pi Pico.


Souris Et Clavier Sans Fil 2.4G


Kit Qualité D'Air RaspBerry Pi Monk







