Specialized in the sale of robotic products! educational robots, toy robots, connected objects
- Home >
- Educational Robots >
- TurtleBot 3 > Turtlebot3 Burger with Raspberry Pi 4 - 2GB


Turtlebot3 Burger with Raspberry Pi 4 - 2GB

Discover the ROBOTIS TURTLEBOT3, the reference development platform designed by ROS.org for companies, research centres and universities. The Robot Operating System (ROS) is an open source environment for the development of autonomous systems. Its large community of users allows for continuous expansion of its capabilities.
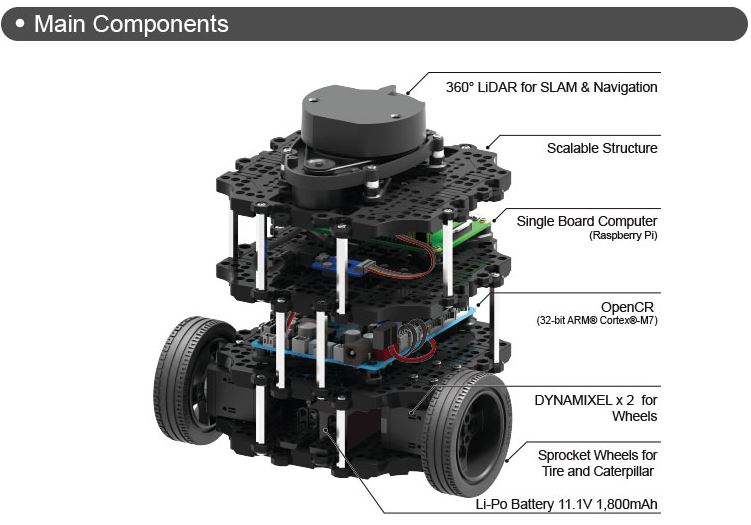
The Turtlebot3 Burger integrates a Raspberry Pi 4, a ROBOTIS 360° LiDAR system, an OpenCR control unit and two Dynamixel servo-motors for mobility.
Turtlebot3 Burger with Raspberry Pi 4 - 2GB
Discover the ROBOTIS TURTLEBOT3, the reference development platform designed by ROS.org for companies, research centres and universities. The Robot Operating System (ROS) is an open source environment for the development of autonomous systems. Its large community of users allows for continuous expansion of its capabilities. The Turtlebot3 Burger integrates a Raspberry Pi 4, a ROBOTIS 360° LiDAR system, an OpenCR control unit and two Dynamixel servo-motors for mobility.
What sets this robot apart is its ability to provide an affordable development platform for simultaneous mapping and localisation (SLAM) and navigation. Thanks to high-quality components, it generates and processes reliable measurement data. In addition, the OpenCR controller board offers countless expansion possibilities, such as the management of a robotic arm or the integration of additional sensor technologies. The preferred application areas of the ROBOTIS TURTLEBOT3 Burger are SLAM and navigation.