

Specialized in the sale of robotic products! educational robots, toy robots, connected objects
- Home >
- Educational Robots >
- THYMIO 2 > Thymio 2


Thymio 2

Thymio II is an affordable educational robot. It provides three main features:
a large amount of sensors and actuators, a specific interactivity based on light and touch, aimed at increasing the understanding of the robot functionalities and a very efficient programming environment based on Aseba.
Thymio II is an improvement of the original Thymio robot. Both have been developed in a collaboration between the Ecole Polytechnique Fédérale de Lausanne (EPFL) and the Ecole Cantonale d'Art de Lausanne (écal). The Thymio II robot has been developed in the framework of the NCCR Robotics program.
The main objective of the Thymio II project is to provide a robot to a large public, to make the exploration of technology accessible to everyone and to enable the integration of robotic technology in the teaching process. That’s why Thymio II is fully Open Source (even hardware).
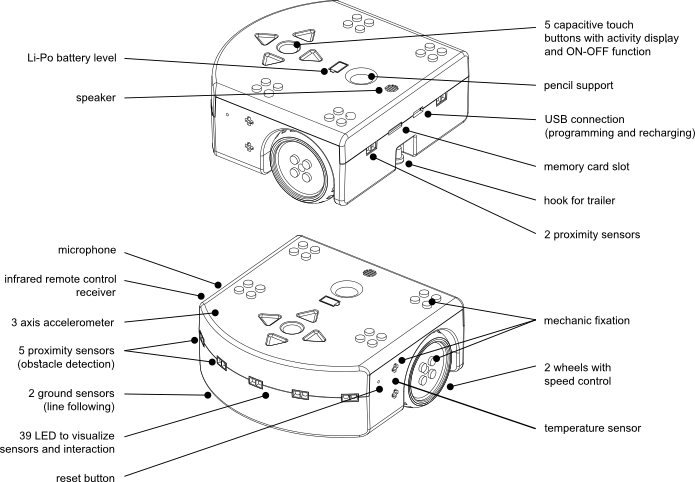
Sensors and actuators
Thymio II has many sensors, several actuators and many human-interface modalities:
The full 3D design of the Thymio II robot is available here. It can be viewed with any Acrobat PDF reader. This document is published under the Creative Commons Attribution-ShareAlike 3.0 Unported License. This PDF file can be visualized with a recent version of Acrobat.
Interactivity
Interactivity is based on several functionalities:
- capacitive touch buttons,
- colour of the body (full RGB spectrum),
- LED associated with each robot functionality.
Pre-programmed behaviours
The Thymio comes with several pre-programmed behaviours. These are always available in the robot. To select one, simply start the robot and select a colour using the arrow buttons, then use the centre button to start the behaviour. While in a behaviour, you can press the centre button again to return to the behaviour-selection menu.
The available pre-programmed behaviours are:
- Friendly (green)
- Explorer (yellow)
- Fearful (red)
- Investigator (cyan)
- Obedient (purple)
- Attentive (blue)
Programming your own behaviours
Thymio II can be programmed to add new behaviours, using the Aseba Studio software running on a computer. This software is open source and can be installed for free by clicking here. Once installed, there are two ways to program Thymio:
- Visual programming allows behaviours to be defined by assembling cards. This is the easiest way to program the robot and is a good starting point to understand how an actuator command (motor, led, etc.) can be linked to a sensor event (button, obstacle, etc.). The Visual programming tool generates programs in the Aseba language, which can then be further extended.
- Text programming allows the robot to be programmed in the Aseba language to fully exploit its possibilities. The Aseba Studio environment helps with programming by providing real-time visualisation of sensor values, instant compilation, etc.
Documentation & Downloads
- Software, samples robots, documentation and much more downloadable on the aseba website.
- 1x Educational open source robot Thymio II
- 1x micro-USB cable












